When it comes to leg design, so far I’ve learned that the leg should be light as possible to have low inertia. With low inertia, it is more efficient and easier to control fast locomotion. You can try it yourself by adding weights to your ankles and going for a run: it is tougher and at the end of the run if you try to do any coordination exercises, it is much harder than without the weights. Off-topic exercise tip from a former basketball player: train coordination and cardio with weights first and then without, it will feel like floating through the air afterwards.
Okay, getting back on track. I want to design robotic legs that are light-weight. That means that the actuator cannot situate in the leg itself but in the body of the robot, unless the power density of the actuator is immense. In addition, the actuator has to be efficient, able to recuperate energy, can be coupled active or passive damper and can work continuously. The actuator can be located to the body of the robot, if the mechanical power is the transmitted with a belt, mechanical lever, tensegrity (tension + integrity) design or hydraulic system to the leg joints.
Solenoids would be pretty good actuators, since they have a simple construction, easy to control, good power density and energy efficiency. However, they are not suited for continuous operation, as the coil of the solenoid will overheat because it would need to have electricity running trough it all the time. Thus, solenoids are energy efficient in non-continuous applications. Pneumatic actuators can be made to resemble human muscles but they suffer from too much damping, caused by the compression properties of air, and time lag in control. Using fluid instead of air, making the artificial muscle hydraulic, would present an interesting research case.
Hydraulic actuators have been a popular choice in quadrupeds, starting from the Big Dog by Boston Dynamics. Dynamics allow decoupling the power source from its application position. In other words, hydraulics offer centralized power generation (e.g. pump) and this power can then be distributed along the robot actuators (hip, knee, ankle, finger, etc.), without adding a lot of weight to those places. However, hydraulics suffer from poor energy efficiency due to servovalve pressure losses and the viscosity losses of the fluid. [source: Katz’s Master’s thesis] Still, hydraulics have their place in the quadruped universe. I would consider replacing the servovalves with DigiValves (series of solenoid actuated on-off valves to control the flow, which could potentially double the energy efficiency of the hydraulic system) or direct driven hydraulics, where each actuator is operated with a designated power source, e.g. pump.
Brushless DC motors seem to be even a better option, or at least more popular, for quadruped actuators. They can achieve high torque densities and efficiency. The actuator designed by Benjamin Katz at MIT consist of a large dimension Brushless DC motor with surface magnets, coupled with a planetary gear and it also has integrated position sensor and control electronics. These actuators are used in tandem (three for each leg) in the Mini-Cheetah. One of the actuators does the Ab-/Aduction of the hip, one hip swing and one is for knee swing. Thus, the robot only uses this one type of actuator and there is a total of 12 of them in the robot. This makes the robot design modular and agile, as the legs can bend both ways from the knee, allowing for the leg to be used as a simple manipulator. The actuator can be also utilized in various other robot designs.

The maximum efficiency of the actuator is just shy of 70 %. The maximum torque is 17 Nm with the power of 250 W. The max speed is 40 rad/s with 24 V operating voltage. Reading Ben’s Master’s thesis I found that all the MIT-Cheetah robots have low mass and inertia legs, which not only allows fast locomotion but simplifies the control since the leg dynamics can be omitted. The lower and upper links weigh only 55 g and 92 g (including knee axle), respectively. Add the spherical foot at the end the belt, the leg still probably weighs less than 200 g. Interestingly, the feet are made out of squash balls that are modified with 3D-printed inserts. They were chosen because they are durable, provide damping and good grip, in addition to enabling for almost omnidirectional contact. Another very clever use of existing technology in another context was to power the quadruped with a power tool battery of 24 V, which has a built in BMS (Battery Management System).

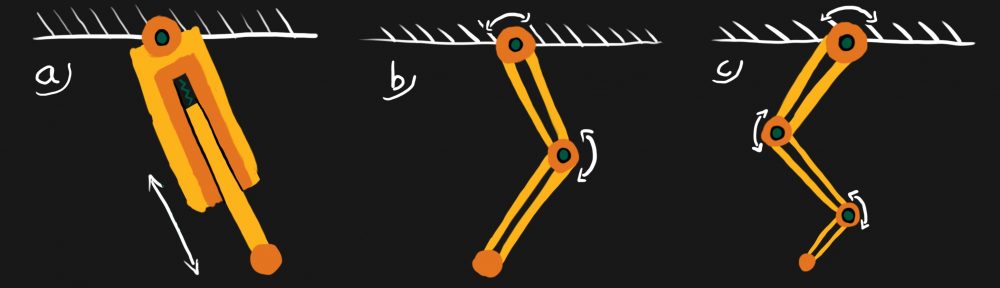
Lower link of the mini-cheetah narrows towards the ankle and the weight-bearing portion is basically an I-bar.
As a comparison, the ANYdrive in the ANYmal has similar torque characteristics but it is slower (max. 12 rad/s) and has lower power density than the MIT-mini-cheetah actuator. The ANYdrive is also a SEA where as the Katz’s design relies on the compliance of the leg rather than using a damping element in the actuator.

The upper link of the mini-cheetah leg is hollow, which makes it light-weight and acts as a casing for the knee joint belt.
Time for brief concluding remarks of this post. It would seem that modular and light-weight design of both the actuators and legs is important in order for the quadruped to be as energy efficient as possible.