Before designing anything, it is good to review what others have done. I was already aware of the big players (Boston dynamics, MIT, ETH) but there few that I had not heard before. Still, I did not have a clue of the performance of all the robots I’ve seen before. How good are they at carrying things? How fast they can go? And most importantly, how energy efficient they are?
The way to compare the energy efficiency of different robots and biological systems is with Specific Resistance (SR). For example, horse trots with SR of 0.2 and a human walks at 0.4 SR. Specific resistance is defined as the ratio of the total energy consumption E for a travel of a distance d (E/ M*g*d) or by the input power divided by the constant velocity (P / m*g*v) with M and g representing the robot mass and gravitational
acceleration; proposed by Tucker in 1975 which he called Cost of Transport (CoT). In the Table below I’ve collected information about some of the most interesting robots from my perspective, which is smart mobility and delivery. I also added some mammals for comparison.
| Robot/Animal | Weight (kg) | Payload/weight | Max Speed (km/h) | CoT | Year |
| BigDog | 109 | 1.38 | 6.4 | 5.7 | 2004 |
| HyQ | 100 | 7.2 | 2010 | ||
| LS3 | 590 | 0.31 | 11.2 | 2010 | |
| WildCat | 154 | 32 | 2011 | ||
| TITAN-XIII | 5.2 | 0.96 | 5 | 1.76 | 2013 |
| MIT Cheetah2 | 32 | 21.6 | 0.51 | 2013 | |
| MIT Cheetah-cup | 1.1 | 5.1 | 6.5 | 2013 | |
| Spot Classic | 75 | 0.6 | – | 2015 | |
| Spot | 32.5 | 0.43 | 5.8 | 0.8 | 2016 |
| ANYmal | 30 | 0.33 | 5.4 | 1.2 | 2017 |
| MIT Cheetah3 | 43 | 0.47 | 9.0 | 0.45 | 2018 |
| Dog: Greyhound | 30-40 | 0.15 | 72 | 1.2 | |
| Dog: German Shepherd | 27-40 | 0.25 | 48 | 1.2 | |
| Human | 50-120 | 0.2 | 45 | 0.4 | |
| Horse | 500-1000 | 0.2 | 88 | 0.2 | |
| Cheetah | 21-72 | 0.1 | 120 | 0.5 |
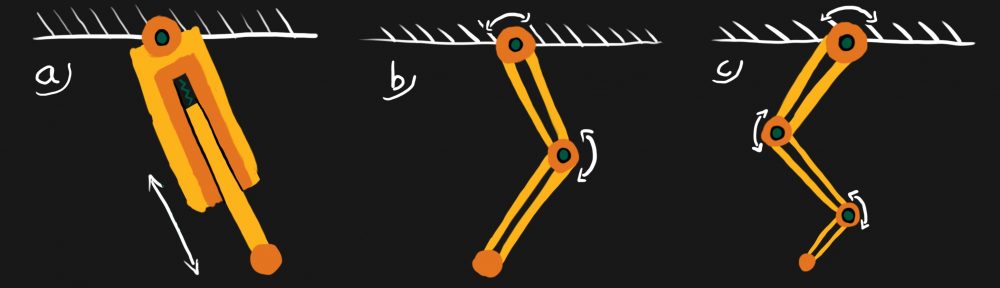
I got started on the Table based on the data found in the article: Analysis and research of quadruped robot’s legs: A comprehensive review by Zhong et al. I double checked and updated the values from other sources and added information about excluded robots. Most of these robots have mammal style articulated legs (see previous post), with the exception of TITAN-XIII (sprawler) and redundant articulated legged MIT Cheetah 2013and BigDog. This post will be followed up with a closer look at the robots that are the most suited for autonomous delivery robots.
Some considerations: at this point, it would seem reasonable to pursue a quadruped that could have a CoT of 0.4 and the maximum speed could be even as high as 25 km/h. In Finland, that it the maximum speed limit for unregistered light weight vehicles. However, to keep the cost of travel low while carrying a payload at high speeds the robot has to be lightweight and agile.