Based on the list from the previous post, I selected the most promising designs for delivery robot purposes that could be energy efficient, fast and able to carry a significant payload in relation to their own weight. I ranked them in the order of their potential which merely intuitive and not based on any scientific data.
| Robot/Animal | Weight (kg) | Payload/weight | Max Speed (km/h) | CoT | Year |
| MIT Cheetah | 32 | 21.6 | 0.51 | 2013 | |
| Spot | 32.5 | 0.43 | 5.8 | 0.8 | 2016 |
| ANYmal | 30 | 0.33 | 5.4 | 1.2 | 2017 |
| MIT Cheetah3 | 45 | 9.0 | 0.45 | 2018 |
Before moving on with the ranking, I should note that all of these robots are actuated with electrical actuators and have articulated legs. Furthermore, all of them can operate 1,5-2 hours per charge.
3. ANYmal
The ANYmal robot was designed at ETH Zurich and is now available at the spin-off company selling and maintaining them, Anybotics. ANYmals have been commercially available since 2017 but the design is based on former StarlETH (Springy Tetrapod with Articulated Robotic Legs) robot, which was a project at ETH from 2011 to 2015.

StarlETH, the predecessor of ANYmal.
From StarlETH to the latest version of ANYmal, each of the robots have mammal-style legs that have three degrees of freedom (DOF) with successive hip abduction/adduction, hip flexion/extension, and knee flexion/extension. Unlike ANYmal, StarlETH weighed 25 kg and had a greater payload capacity, up to 20 kg. However, the CoT of StarlETH was on average 2.5. The StarlETH used carbon fiber and aluminium in the main body and placed the
actuators at there. The legs were then moved by the actuators through the use of chain and cable pulley systems. This is beneficial to ensure fast swing leg motion and to reduce impact losses at the intermittent ground contact. Most importantly, StarlETH has Series Elastic Actuators (SEAs) which control all joints using linear compression springs in a pre-compressed setup. Springs decouple the motor and gearbox from the joint. This setup protects the system from impacts, allows for energy storage to improve the efficiency, and provides full torque controllability. All joint angles, motor angles, and spring deflections are measured in every joint. Here is a video, explaining what SEAs are:
[embedyt] https://www.youtube.com/watch?v=gZLO2Am0Zk8[/embedyt]
In the ANYmal design, Hutter et al. introduced novel, compliant joint modules with
integrated electronics called ANYDrive. This enabled the simple mechanical topology with three equal joint units per leg that are linked by rigid mechanical segments. Since the encapsulated and sealed joint units integrate drive electronics and sensing, as well as the joint axle bearing, the robot does not require any additional bearings, transmission, proprioceptive sensors, or electronics in its legs. These drive units make the robot is simple to manufacture, assemble, and maintain. In case of failure, a complete joint can be easily exchanged. Furthermore, design variations to build different robots requires only to change the mechanical links.
Although ANYmal has a lot of great merits, it is quite slow (due to high-inertia legs) and the payload-to-weight ratio is not as good (because it is designed primarily for monitoring purposes) as Spot’s.

The ANYmal robot is available through ANYbotics.
2. Spot
Boston Dynamics (BD) has been the leading manufacturer of legged robots for over a decade. The little doggy robot, Spot, is a successor of the hydraulically actuated Big Dog, has been at the spotlight since it is one of the first quadrupeds with a price-tag ($74,500). Unfortunately, BD has no scientific publications of their robots.

Legacy (or Classic) Spot that is the predecessor of the modern retail version.
However, Spot has the advantage of easy programming, as the software has been designed so that it can be used by Companies and Universities for their own respective purposes. Unlike ANYmal, Spot does not have modular ANYdrives but it has a great slim design that is integrated altogether nicely. It’s like the ANYmal is the Fairphone and Spot is the iPhone: ANYmal might be a bit slower and less fancy but it is easy to maintain, fix and it even has a possibility to hardware upgrades like changing just the joint ANYdrives to new model. However, this comes at the cost of less slim and elegant design. Spot moves faster and smoothly but if you need to replace a part its much harder. However, I would still choose the iPhone over the Fairphone for personal use because it just works better.
Spot is a very versatile robot dog, which can be used not only for monitoring tasks but also operation such as opening doors and handing tools with its manipulator arm (sold separately). Spot is still slower and has worse CoT comparing to MIT-Cheetah III.

Boston Dynamics’ Spot Robot Dog is Available for $74,500
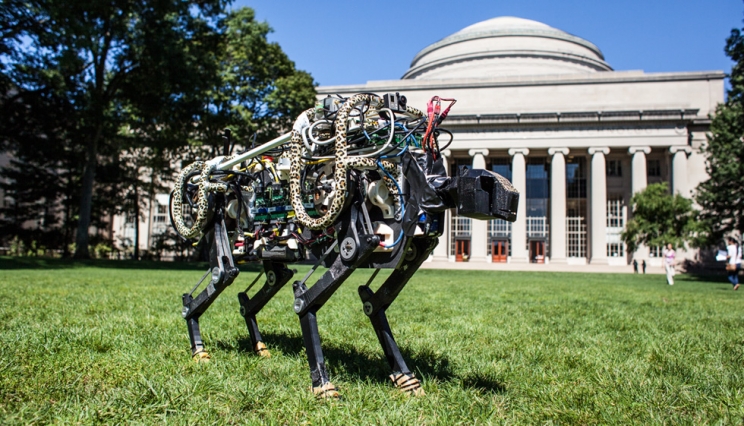
1. MIT-Cheetah
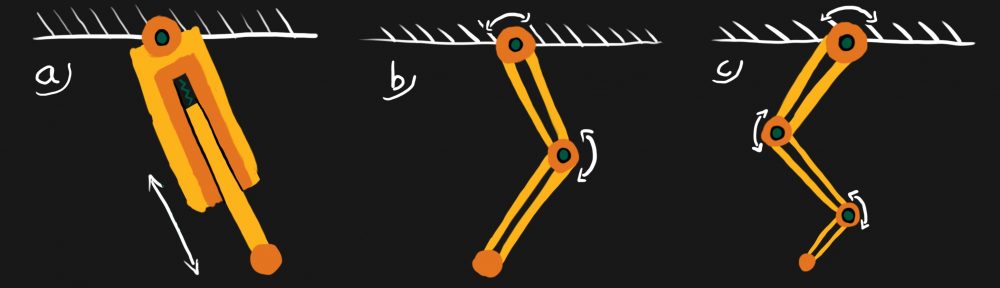
The first MIT-cheetah had articulated front legs but the hind legs were redundant articulated ones. It was faster than other robots, except for the BD’s cheetah, and more biomimicing design than most of the previous robots. It was also, with StarlETH, paving the way for electrically actuated quadrupeds, since before them most quadrupeds were powered by an internal combustion engine and actuated with hydraulics. The main four design principles of the MIT-Cheetah 1 that made it so energy efficient were high torque density motors, low impedance transmission, energy regenerative electronics and a design architecture that minimized the leg inertia.
MIT-Cheetah 1 looked a lot like the actual cheetah animal.
MIT-Cheetah 2 has a lot of the same looks as the previous version. It is however more strudy and no longer features the bone-like spine of the version 1. The speed of the robot is the same for both versions 1 and 2.
MIT-cheetah 2 could jump over 33 cm obstacles and trot at the speed of 21 .6 km/h. I still had the redundant articulated hind legs like its predecessor.
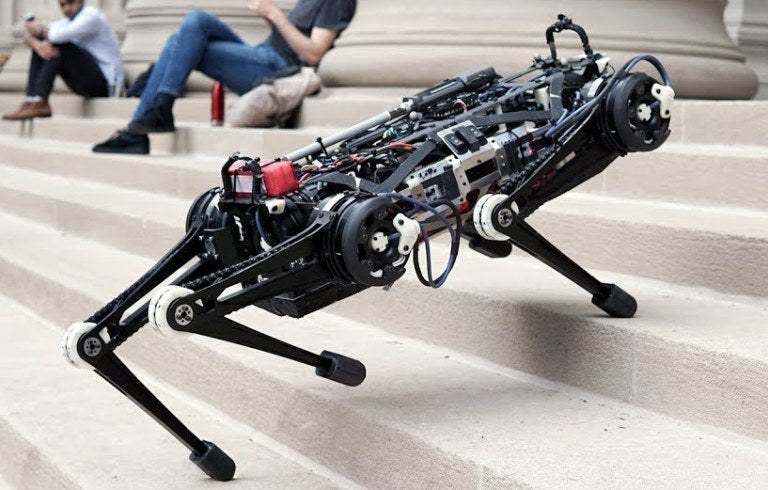
Cheetah 3 relies more on tactile information about the terrain when making decisions about its movements and steps, since vision data (camera and laser) can be noisy and unrealiable in bad weather and lighting conditions. In addition to blind locomotion, the robot has improved hardware, including an expanded range of motion compared to its predecessor Cheetah 2, that allows the robot to stretch backwards and forwards, and twist from side to side, much like a cat limbering up to pounce.
All version of MIT-Cheetahs have actuators situated at the body of the robot, just like in the ANYmal predecessor StarlETH. It also comes together nicely doesn’t it?
MIT-Cheetah 3 has only articulated legs, which can bend backwards and frontwards. The robot is more robust and nimble than its predecessors, however, its max speed is reduced to 9 km/h from its predecessor.
Comparing the MIT-Cheetah 3 to ANYmal and Spot, it is faster and mostly because of it, more energy efficient (kWh/km). Furthermore, it is much more nimble. It can jump on a higher obstacle than its own withers height and walk with only three legs. Cheetah is also faster at making decisions autonomously because it is “blind” and trust more on tactile feedback than visual for moving. According to the lead designer, Prof. Sangbae Kim, this allows for the robot to “plow through” instead of thinking too much.
The only thing that seems to be missing, is the payload carrying data for the Cheetah 3. There is a comparison to the ANYmal based on the force producing capability:
“Cheetah 3’s actuation system was designed to give the robot performance headroom for tasks including high speed locomotion, jumping, carrying loads, and recovering from extreme disturbances. As a simple performance metric, with the leg minimally extended, the robot is capable of producing a purely vertical ground reaction force of over 700 N, about 1.6 times the weight of the robot, per leg. And at 70% extension, a typical configuration during operation, vertical force capability exceeds 1000 N per leg. By contrast, other quadruped robots for which data are available have far lower force-to-bodyweight capabilities: At minimal leg extension, ANYmal can produce around 0.54 bodyweights per leg.” – MIT Cheetah 3: Design and Control of a Robust, Dynamic Quadruped Robot (2018)
Based on this data and that can ANYmal can carry its own mass of 30 kg and a payload of 10 kg, it would seem that Cheetah 3 would posses the potential to carry 73.5 kg on top its own mass of 45 kg, which would result in a payload-to-weight ratio of an impressive 1.63. However, this is only a speculation as no scientific results have been reported as the research goal of the MIT-Cheetah seems not be the maximization of the payload capacity but merely having the capability of carrying a payload.
Cheetah 3 is extremely agile. Here it jumps to a desk that is 76 cm high.
I think that all of these three state-of-the-art robots give vital insights to robot design. Each of them is very successful and has individual merits worth praising. All top three robots can take a hit, a tackle or fall down and still continue operation so they are all robust to uncertain events. Nevertheless, it seems that ANYmal is the most production ready, then Spot and lastly MIT-Cheetah 3. However, the potential of energy efficient and fast locomotion delivery robot design is in the inverse order. Thus, high torque density actuating, low inertia legs, energy recuperation and low impedance transmission are key factors to keep in mind.