There are three main types of leg designs in the quadruped robots so far: prismatic, articulated and redundant articulated [1]. The prismatic leg has only one joint point, which can be thought as the hip. Therefore, there is knee joint. The leg itself can retract and expand telescopically by using a passive string or an active electromechanical, pneumatic or hydraulic actuator. Even though prismatic legs are easy to control, they only have up to 2 degrees of freedom (hip: forward-backward, hip: side-to-side). Since we operate in a three dimensional world at least three degrees of freedom would be desirable.
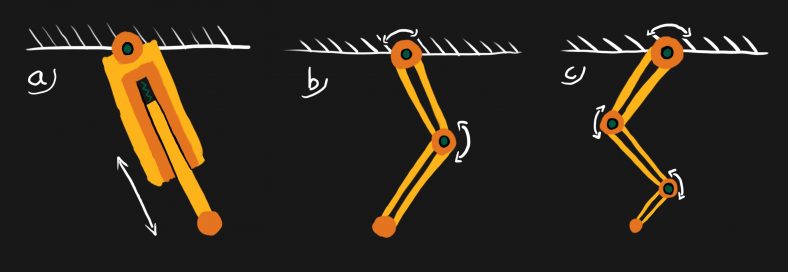
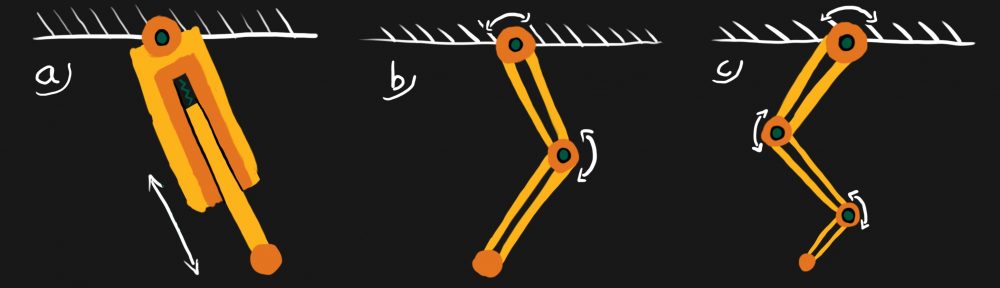
Three types of quadruped leg design: a) prismatic b) articulated c) redundant articulated.
Articulated legs are ones that have a knee joint and only optionally have a prismatic shank. Therefore, a third degree of freedom is introduced (hip+knee: up-down). Prismatic legs could do this but very limitedly compared to articulated legs. Articulated legs can be arranged in a mammal or sprawler type configurations. Mammal type resembles is standing like a dog and sprawler is has knees pointing outwards from the body like an ant.
Redundant articulated legs have been bio-inspired from toed or hoofed animals, such as dogs, cats and horses. In addition to the knee joint, they have at least one more joint biomimic the “paw” of animal. There could be more joint in redundant articulated legs, but having hip-knee-ankle joints is the most common type.
In the table below the pros and cons are listed of each of the leg type are listed for comparison. Based on these qualities, it would seem that for an energy efficient yet fast (=low inertia) one might need to make a comprise and use articulated legs or low inertia redundant articulated legs.
| Prismatic | Articulated | Redundant Articulated | |
| Control complexity | Easy | Challenging | Complex |
| Cost | Cheap | Costly | Expensive |
| Minimum of actuators | 1 | 2 | 3 |
| Minimum of joints | 1 | 2 | 3 |
| Lightness | Light | Heavier | Heavy |
| Simplicity | Simple | Complex | More Complex |
| Control | Easy | Challenging | Complex |
| Inertia | Low | Medium | High |
| Kinematic performance | Clumsy | Agile | Very Agile |
| Energy Efficiency | Bad | Better | Best |
References: